吴校生:水下微小无人机集群发展综述
点击: 作者:吴校生 来源:数字海洋与水下攻防 微信号 发布时间:2021-02-15 12:31:35

《数字海洋与水下攻防》刊载范围主要包括:智慧海洋、海洋环境、海洋信息、海洋大数据、水下攻防体系、水下警戒探测、水下信息网络与指挥控制、水下智能对抗、水中兵器及无人装备等。系《中国学术期刊综合评价数据库》统计来源期刊、《万方数据——数字化期刊群》收录期刊、《中国核心期刊(遴选)数据库》收录期刊,被《中国期刊全文数据库(CJFD)》、超星期刊域出版平台全文收录。
作者:吴校生
作者单位:上海交通大学 微米/纳米加工技术国家级重点实验室
作者简介:吴校生,男,博士,副研究员,主要从事微机电系统技术及其应用的研究。
摘 要 水下微小无人机集群具有体积小、功耗低、集群智慧等特点,可广泛应用于船舶故障排查、水下防恐安全检查、海底采矿、海底通讯中继等领域。CoCoRo,M-AUEs,SmarmDiver等典型水下微小无人机集群成功实现了海洋生物行为模拟、海洋生态环境监控、水底搜索等功能。水下微小无人机集群在多传感器搭载及数据融合、水下通讯、定位、集群控制等技术上还需进一步完善,我国应加强在该领域的研究开发。
关键词 水下无人机;微小;集群
引 言
水下无人机的工作模式可分为单体模式和集群模式。单体工作模式的水下无人机(也被称为水下机器人)功率大、航速大、航程远,携带的任务执行器、传感器、通讯定位器件多,功能全面,自动化程度高,已经在海防、水底搜救、水文勘测、故障排查等领域有了广泛的应用。但单体水下无人机也存在不足[1],如:功耗大,需具备强大的能源装置;鲁棒性不强,一旦部件发生故障则任务执行失败;造价昂贵,不适合大批量集群布局;体积大带来隐蔽性差、渗透性不好;要求水下长距离通讯,增大了通讯及定位难度。
近些年来,国内外重视开展了水下微小无人机集群技术的研究。水下微小无人机集群通常由几十上百个个体组成,每个个体体积小、功耗低、功能单一、造价便宜。工作时,个体之间分散布局在一个较大的水域,形成水下三维空间大区域的覆盖。个体在集群中的分工明确、协同工作,非常适合在指定区域进行快速水文搜集、定点通讯中继、水下故障排查等水下工作[2]。采用集群工作方式具有很大的鲁棒性,系统冗余特性能确保个体出现问题但不影响集群的整体工作[3]。集群模式下的水下无人机个体小,具有很好的隐蔽性和渗透性,不易被发现。由于每个个体都可以作为通讯中继,因此集群可实现较远距离的无线水下通讯。
集群模式下可具备集群智慧。自然界中的鱼群在捕食、迁徙或是躲避敌害时常常会呈现集群行为模式。个体的行为主要由吸引力和排斥力的合力决定,当吸引力和排斥力相抵消的时候,生物界称之为“平衡距离”。个体依靠其广角视觉和敏感的侧线系统,可以获得高度同步的速度和方向。在集群智慧作用下,集群模式可协力更好地完成个体模式实现不了的强大任务。
水下微小无人机集群虽然具有诸多优势,但也存在明显的不足[4],如:驱动力有限,易受水流的影响而失去控制;须有及时的能量补充等。当前,国内外针对水下微小无人机集群开展的研究工作还是起步阶段,本文针对这些工作及进展进行综述,以供决策参考。
1 水下微小无人机集群的应用
地球陆地面积占地表面积的29%,剩余的71%为水域面积。经过数万年的文明历程,人类对陆地的探索较为充分,但受限于技术手段,人类对水下世界的了解还甚少。地球水下最深的地方是马里亚纳海沟,深度约为11 km,此处的水下压强约为大气压强的1 100倍。业余潜水员潜入水下40 m的深度时,单次只能停留几分种,专业的潜水员最深能潜到300 m的深度。要想了解更深的水下世界需要借助潜艇或水下机器人。水下无人机可以潜入到更深的水下空间进行水底地形测绘、海底生物生存状态监测、矿产资源勘探、海上军事防御等作业。通过采用小型的、造价低廉的水下无人机组成的集群可增大无人机水下作业的覆盖面积,提高工作效率[5]。水下微小无人机集群的应用非常广泛[6],具体叙述如下。
1.1 船舶故障或安全检查
水下无人机集群的一个典型应用是舰船反恐检查。海上安全检查中一项重要工作是防止恐怖组织在大型商用或民用船艇底部放置附着水雷。当海外船只进入中国海域并准备靠岸之前,通常是让潜水员潜入船底排查,这是一项非常昂贵且危险的工作,并受天气条件影响。若采用价格低廉的水下微小无人机集群完成这项工作就非常简单了。通过在被检查船周围释放水下无人机集群,无人机集群潜入到船底协同进行故障或安全检查,集群合作可快速完成任务。完成任务后的无人机集群接到指令后可自行集结回收。
1.2 海底采矿
在海床上进行矿产资源搜寻与采集是水下微小无人机集群另一个潜在应用。例如:美国发现在夏威夷岛的海床上,由于火山活动造成海床上分布大量的锰结核矿产资源,锰是一种比较珍贵的矿物质。这些锰结核分布的区域广并且处于较深的海域,如果让潜水员去采集会非常危险。通过水下微小无人机集群去完成这项工作会是非常经济实用的方式。
1.3 石油钻井平台水下维护
当前,钻井平台水下结构的维护都是通过专业潜水员或远程控制的机器人去执行。专业潜水员在极大水压下长达数天的水下操作是非常危险也是繁重的工作,水下微小无人机集群非常适合应用于这种水下机构的清洗、故障微小或其它常规维护检查,这可减少专业潜水员或远程操控水下机器人的水下作业量。
1.4 其它应用
水下微小无人机集群还可用于海洋有毒物质的搜寻,海底光线的维护或排查等。在军事领域,水下微小无人机集群还可用于水下通讯中继。水下无人机集群在水下或水面进行组网布局,可用辅助潜艇或其它水下军用装备的通讯或定位,提高通讯效率和定位精度。在作战或敏感海域布局水下微小无人机集群还可用于封疆或海底侦察等。
2 水下无人机集群国内外的发展
水下无人系统组网化和协同化已得到各国的重视。美军不再强调追求单个水下无人平台功能的最大化、最强化,通过系统集成手段,将单一复杂系统的功能分布化,通过组网、集群形成分布式作战能力。水下“集群”作战通过信息链路将水下无人自主系统组网,是实现能力倍增、更好地解决特定问题的有效途径。世界各国都在争相发展水下无人机集群技术。
2.1 欧盟的CoCoRo水下微小无人机集群[7]
为了研究微小型水下无人机集群,欧盟于2011年设立CoCoRo项目,CoCoRo全称为Collective Cognitive Robotics,即集体认知机器人,项目资助经费为290万欧元。在该项目资助下,奥地利Graz大学人工生命实验室研究人员于2015年9月发布了由41个水下机器人微小个体组成的当时世界上数量最多的水下机器人集群,如图1所示。他们的研究目标:了解机器人网络是否能够展示群体认知,将该系统形成的群体智能与自然界中的生物集群进行比较研究。
CoCoRo机器人个体的平面尺度约12 cm,安装有3个执行驱动装置分别控制水平方向上的2个自由度(平移或绕行)和垂直方向上的1个自由度(沉浮)。个体之间采用LED光信号方式进行短距离通讯,同时辅助有RF通讯和声呐长距离通讯与定位,个体还搭载有光学传感器、惯性传感器、压力传感器等。

图1 CoCoRo水下微小无人机集群
2.2 加州大学San Diego分校的微小水下探索者(M-AUEs)集群[8]
2017年1月,美国加州大学San Diego分校报导了一种个体体积为1.5 dm3的水下微小无人机集群,他们称之为微小水下探索者(Miniature Autonomous Underwater Explorers,简称M-AUEs)。该微小机器人可模仿海洋浮游生物的行为,他们用了16个M-AUEs组成的集群进行了水下实验,如图2所示。
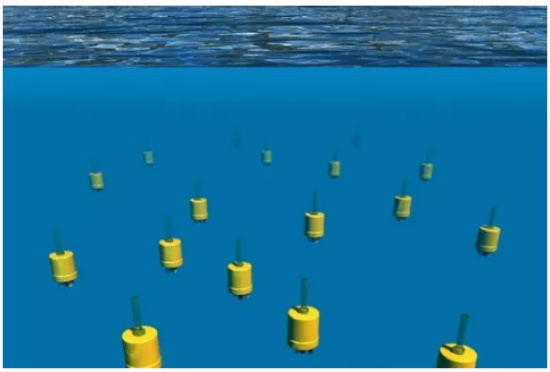
图2 加州大学San Diego分校微小水下探索者(M-AUEs)集群
他们在M-AUE上安装了浮力控制装置用于控制深度,同时还搭载了温度传感器、压力传感器、水声传感器、发光LED、GPS天线、RF信标等装置。在5 h的实验过程中,16个M-AUEs组成的集群分布于300 m直径的海域内并随着洋流漂移,浮力器控制集群10 m水深,集群在海底三维空间内采集温度信息,集群收集到的温度数据为研究洋流对浮游生物生存状况的影响提供参考。
2.3 美国Aquabotix公司开发的SwarmDiver水下微小无人机集群[9-10]
美国Aquabotix公司开发的SwarmDiver水下微小无人机是近年比较成功的商业产品。它的长度为75 cm,重量为1.7 kg,能达到的水下深度为50 m,最大航速为8 km/h,最大运行时间150 min,搭载有温度和压力传感器,能以40个以上个体的集群模式工作。SwarmDiver于2018年投入市场,目前有Stealth,Nightline和Edge三款产品,单个售价1 000~10 000美元不等。据Aquabotix公司介绍,SwarmDiver可用于海洋环境监控、羽流跟踪、3D数据网络收集、自主声探等。
SwarmDiver还具有很多军事用途。从2018年SwarmDiver投入市场到现在1年多的时间内,美国海军对Aquabotix公司的SwarmDiver做了3次采购合同,分别为:2018年6月美海军花费78 000美元委托Aquabotix采用SwarmDiver协助海军搜寻定位水底“未爆炸的军械”;2019年1月美海军花费70 000美元与Aquabotix签署第2个合同,用于向海军人员展示或测试SwarmDiver性能;2019年5月有报导美海军花费约150 000美元用于购买SwarmDiver。此外,SwarmDiver还获得了澳大利亚海军的贸易合同。
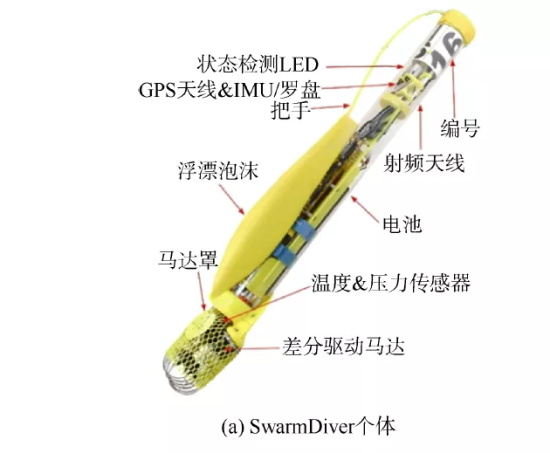

图3 Aquabotix公司开发的SwarmDiver水下微小无人机及集群
2.4 国内对水下微小无人机集群的研究[11]
近些年来,国内的一些高校或研究所都在开展水下无人机集群的研究工作,这些高校或研究所包括中科院沈阳自动化研究所、哈尔滨工程大学、西北工业大学、天津大学等。如:中科院沈阳自动化研究所先后研制了“探索者”、“CR01”、“CR02”、“潜龙一号”、“潜龙二号”一系列航行器,为我国海底金属硫化物勘探提供了高效、精细的手段;哈尔滨工程大学完成了300 kg级自主水下航行器(智水-IV)的研制,实现了海域110 km的自主航行和自主布防等功能,潜深可达1 000 m;西北工业大学研制了“300 m航深、300 km航程”和“500 m航深、500 km航程”远程智能水下航行器,具备航路自主规划和安全布放回收功能。
当前,国内在大型水下航行器方面的研究已经处在了世界前沿水平,针对水下集群技术研究较多,但水下微小型无人机集群系统的实践研究报导较少。
3 水下无人机集群的发展挑战
与工作在空气中的无人机集群不同,水环境给水下无人机带来一系列的挑战,这些挑战包括:水环境下所采用的传感器,水下的通讯、定位等。[12]
3.1 传感器技术及多传感器数据融合
相比于一般无人机,应用于水下无人机中的传感器种类要少很多。由于水中的射频或高频电磁波不能长距离传播,因此基于电磁波机理的传感器就不能应用于水下无人机中。在水下无人机中应用最多的是压力传感器,用于测量水深,还有电子罗盘传感器。实际应用中,要求这2种传感器具备好的一致性,即长时间使用后它们的精度还需要和第一次使用时的一样。由于水下没有GPS信号,水下的定位或轨迹规划通常需借助IMU(惯性测量单元,即三轴加速度和三轴陀螺)的航位推算技术,但低成本的MEMS IMU时间累积误差会导致较长时间工作后位置计算偏差越来越大。为了消除时间累积误差,水下无人机工作一段时间后需要浮出水面来接收GPS信号,以更新准确的位置信息。声呐传感器是水下无人机的另一个重要器件,它可以单个工作也可以阵列形式工作。声呐传感器可用于测量无人机与周边物体之间的距离,还可以用于环境地图测绘。水下无人机通常还搭载有照相系统,用于识别环境,成像效果好坏在很大程度上取决于水质。这些传感器提供的部分信息是重叠的,数据融合算法可利用这些重叠信息来改善测量精度。
3.2 水下通讯
由于电磁波在水下传播距离极短,传统的基于电磁波的通讯及定位技术在水下不能直接应用。研究发现电磁波在水下的传播距离和波长相关,波长越大(即频率越小),它的传播距离越长。因此,为了增大电磁波在水中的传输距离,可采用中、低频声波。除了采用电磁波通讯外,有的水下无人机还采用可见光来进行光通讯。如,在欧盟开发的CoCoRo集群中,它们用LED灯发出的光强或闪烁频率来和周边无人机进行信息传播。测试发现,这种光通讯数据传输率可达到119 kbs。光在水下的传播距离也不会太长,受水质影响较大。CoCoRo中不仅仅采用光通讯,它还采用了声通讯。很多海洋生物都是采用声通讯方式来实现个体之间的信息交流。声通讯传播的距离远,但它也存在一些不足,如经物质反射回来的声波会对原始声波产生干扰;声波频率较低,导致它的数据传输率会很低,低至30 bit/s。
3.3 集群控制理论
集群工作时,集群算法能确保集群执行任务的效率和行动的一致性,通常采用的算法是共识控制(Consensus Control)。在集群控制中,最简单的办法是中央控制,即有一个主控制无人机,主控制无人机控制着成员的行为,这要求主机与成员之间时刻保持好的通讯,这在水下环境中很难做到。因此,有人提出去中心化控制系统,如同区块链技术。在去中心化控制系统中,不存在主控制成员,因此大大减轻了通讯压力,集群中个体只需定位其周边邻居个体位置,通讯也是邻居之间发生的。共识控制就是这种去中心控制方法,通过相邻个体之间的信息传递,集群中每个个体能实时知道集群中所有个体分享的位置、任务、运动等信息。
4 水下微小无人机集群发展趋势分析
纵观国内外发展现状,水下无人机集群在以下3方面必将得到长足发展[13-14]。
1)延长水下工作时间。水下无人机的典型应用是海洋观察和搜集科学数据,这通常要求无人机能够在更大的空间范围和更长的工作时间持久地对海洋进行调查。无螺旋桨驱动模式成为当前的研究热点,如:近些年开发的水下滑翔机通过调节浮力和机翼来产生浮力,以保持在水下的滑翔运动。另外,一些新的能量采集技术也可被用于水下无人机,用于补充能量延长工作持续时间。采集的能量来源很广泛,包括:洋底的热能、洋面的太阳能、洋流能、波浪能、生物能等。
2)仿生水下微小无人机。经过亿万年的进化,水下生物具有最优化的流体动力学外形和运动机制,仿造具有水下生物外形和运动机构的水下无人机可获得最佳的工作效率。各种类型的微小水下机器人被广泛研究,如:机器鱼、螃蟹、蛇、龟等。当前,这些研发的仿生水下机器人性能还不足够好,还不能实际应用,但它们具有优越的隐蔽性,在军事及海洋生物调查等领域具有广泛应用前景。随着新能源、新材料技术的发展,仿生水下机器人及其集群必将会得到广泛和长远地关注。
3)智能化。近些年来发展得如火如荼的人工智能、物联网技术将会应用到水下无人机集群,以提高个体的自动化、环境认知能力及形成群体智慧。遥控水下无人机(ROV)和自制水下无人机(AUV)几乎是同时被提出的,但AUV受制于人工智能、自动控制、传感等技术,还不能完全替代ROV,AUV和ROV还将长期存在。当前,ROV比较擅长于小区域的精细水下作业,AUV可进行长距离大范围水下搜寻和探测。环境认知能力可以帮助水下无人机避障、路径规划、识别特定目标物。随着人工智能、物联网技术的发展,水下无人机的环境认知能力必将大大提升,可通过环境信息及群体知识来辨别未知物体或环境。集群智慧是水下无人机集群智能化的另一个体现,水下集群智慧依赖于水下通信网络。水下声通信技术的发展为水下无人机集群智慧的获取提供有力的技术保障。
结束语
相比于传统水下无人机,微小无人机集群具有造价便宜、渗透性强、系统纠错能力强、可采用集群智慧来工作等特点,其在船舰维修、安全检查、海底采矿、设施维护等领域具有较大的应用前景,已得到广泛关注。美国、欧盟等国家或地区相继开发了多款微小型水下无人机集群,并成功地应用在海洋生物生存环境的数据采集、水下目标搜索等领域。这些集群的个体尺寸大多不超过1 m,有的甚至更小,个别微小无人机集群已经完成了商业化生产,并得到军方应用。水下微小无人机集群很多技术还需要进一步发展与完善,如搭载的传感器、驱动器的可靠性提高,水下通讯与定位技术等。随着这些关键技术的成熟,水下微小无人机集群的应用空间会更加宽广。
水下无人机的小型化、价格低廉这些特性有利于它的民用化,如同空中飞行的微小无人机,相信在不久的将来必会掀起新的一轮水下无人机应用高潮。为了赶上这个领域中的创新前沿,政府机构在政策上需足够重视,加强投资与引导,这样才能确保我国未来在该领域的领先地位。
原文刊登于《数字海洋与水下攻防》2020年第3期(图片来源网络 侵删)
责任编辑:向太阳
特别申明:
1、本文只代表作者个人观点,不代表本站观点,仅供大家学习参考;
2、本站属于非营利性网站,如涉及版权和名誉问题,请及时与本站联系,我们将及时做相应处理;
3、欢迎各位网友光临阅览,文明上网,依法守规,IP可查。
作者 相关信息
• 昆仑专题 •
• 高端精神 •

• 新征程 新任务 新前景 •

• 习近平治国理政 理论与实践 •

• 我为中国梦献一策 •

• 国资国企改革 •

• 雄安新区建设 •

• 党要管党 从严治党 •

热点排行



建言点赞

图片新闻